Research
Publications and Projects
Robotics · Artificial Intelligence · Engineering Education
Ph.D. Dissertation
2024
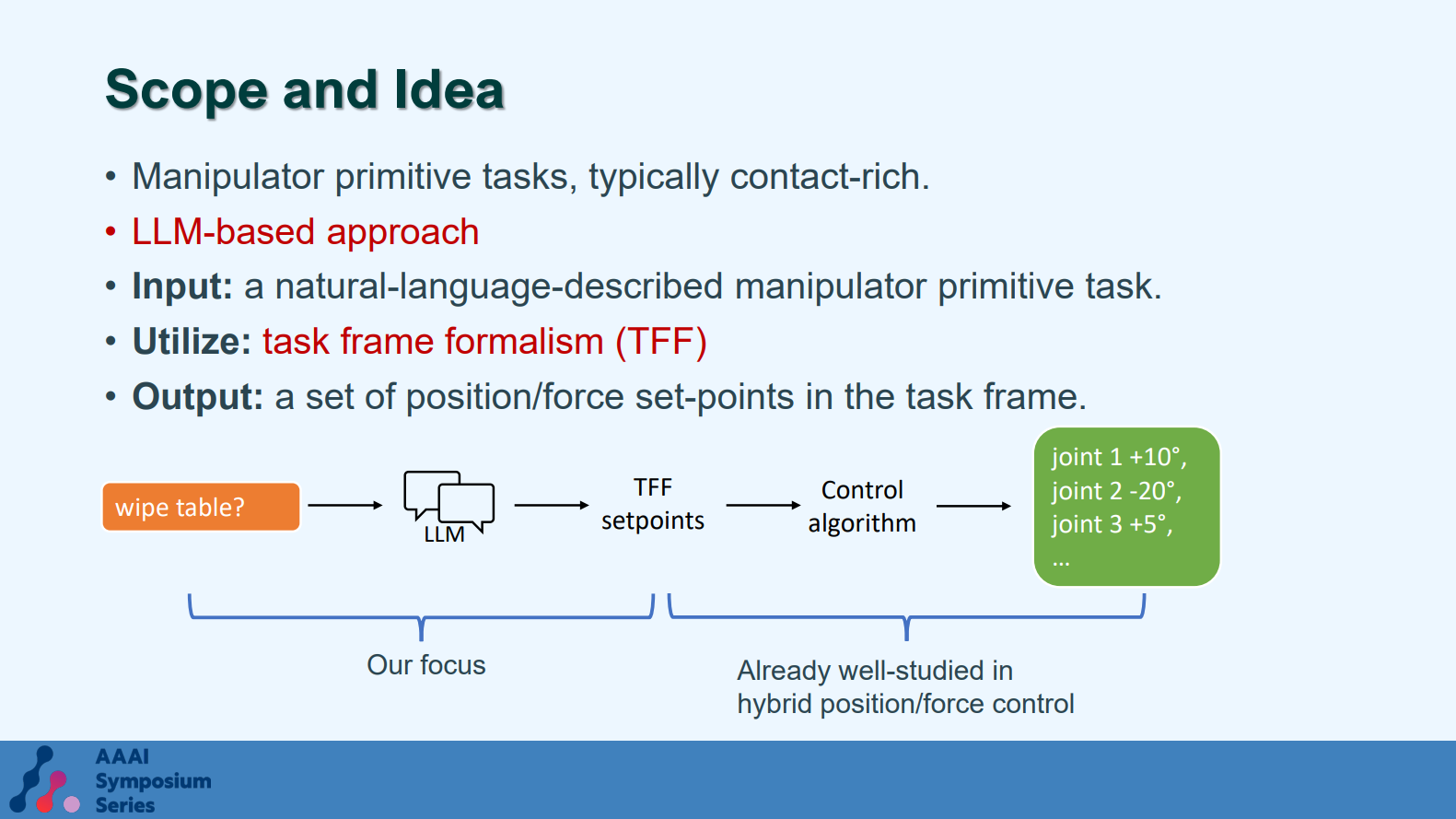
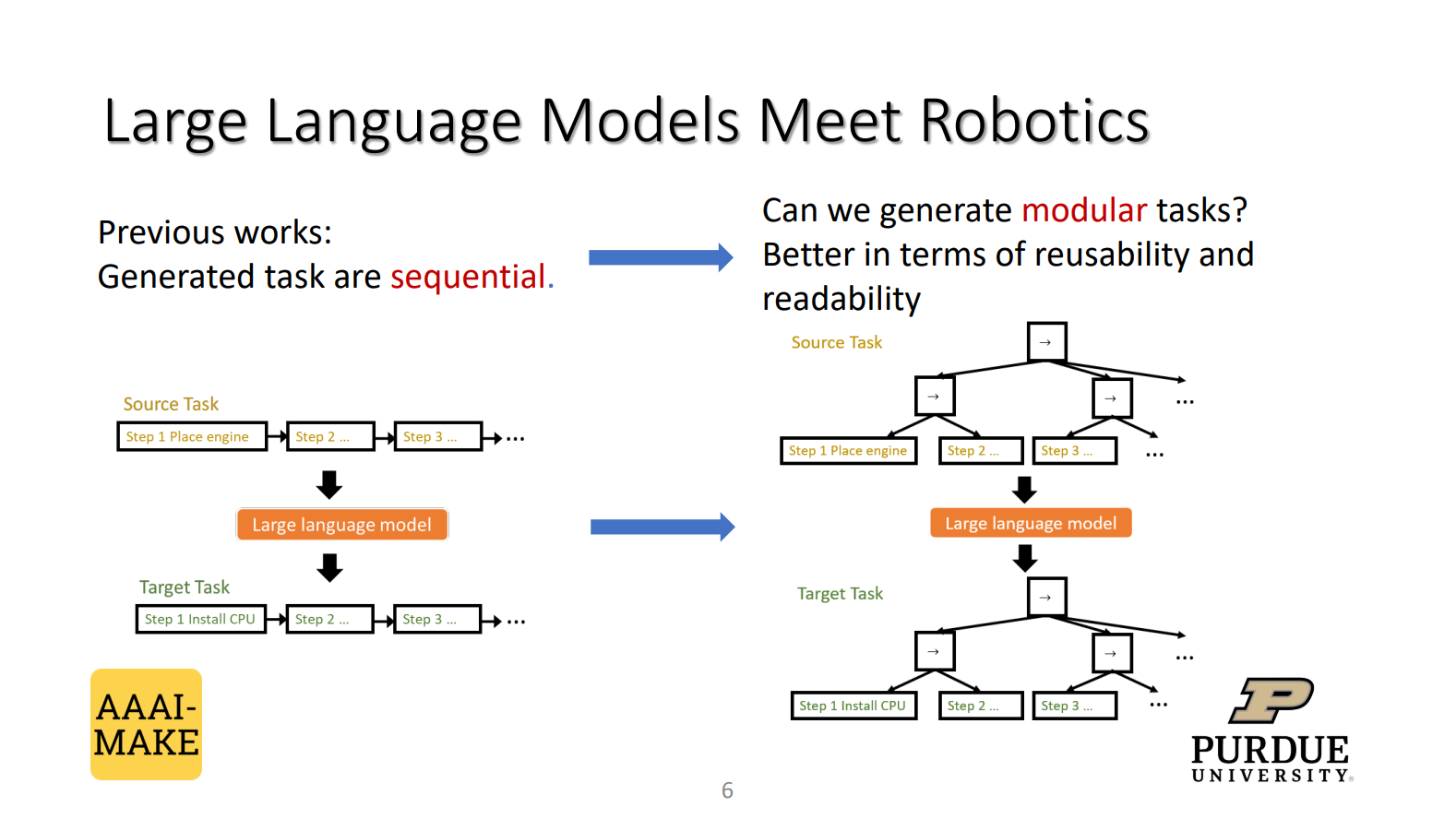
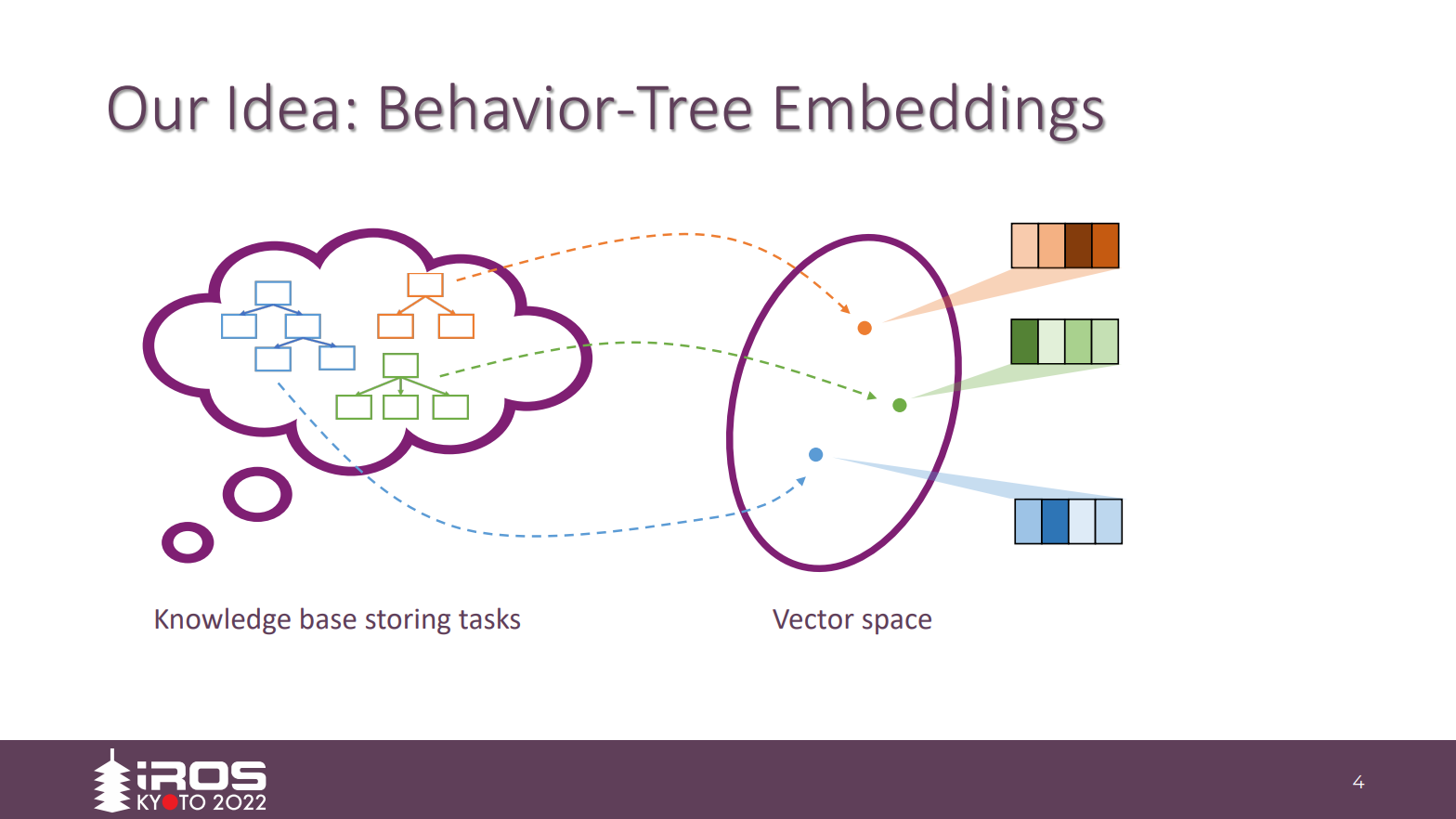
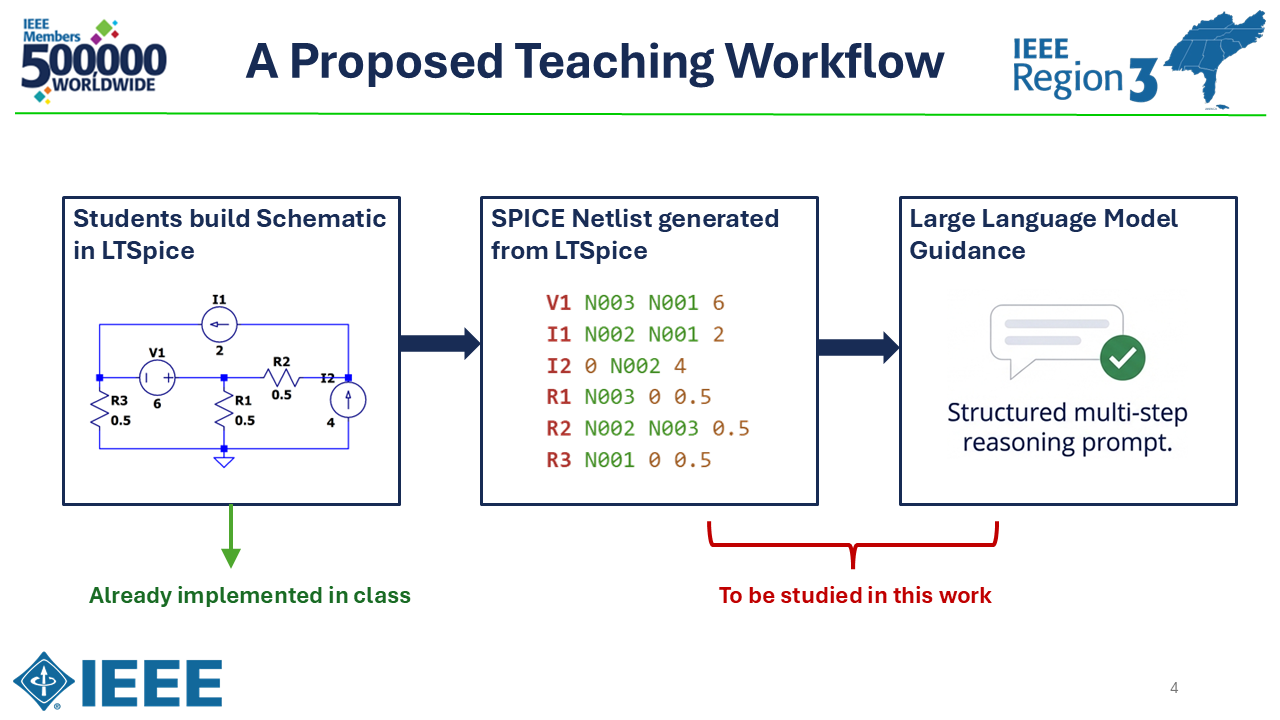
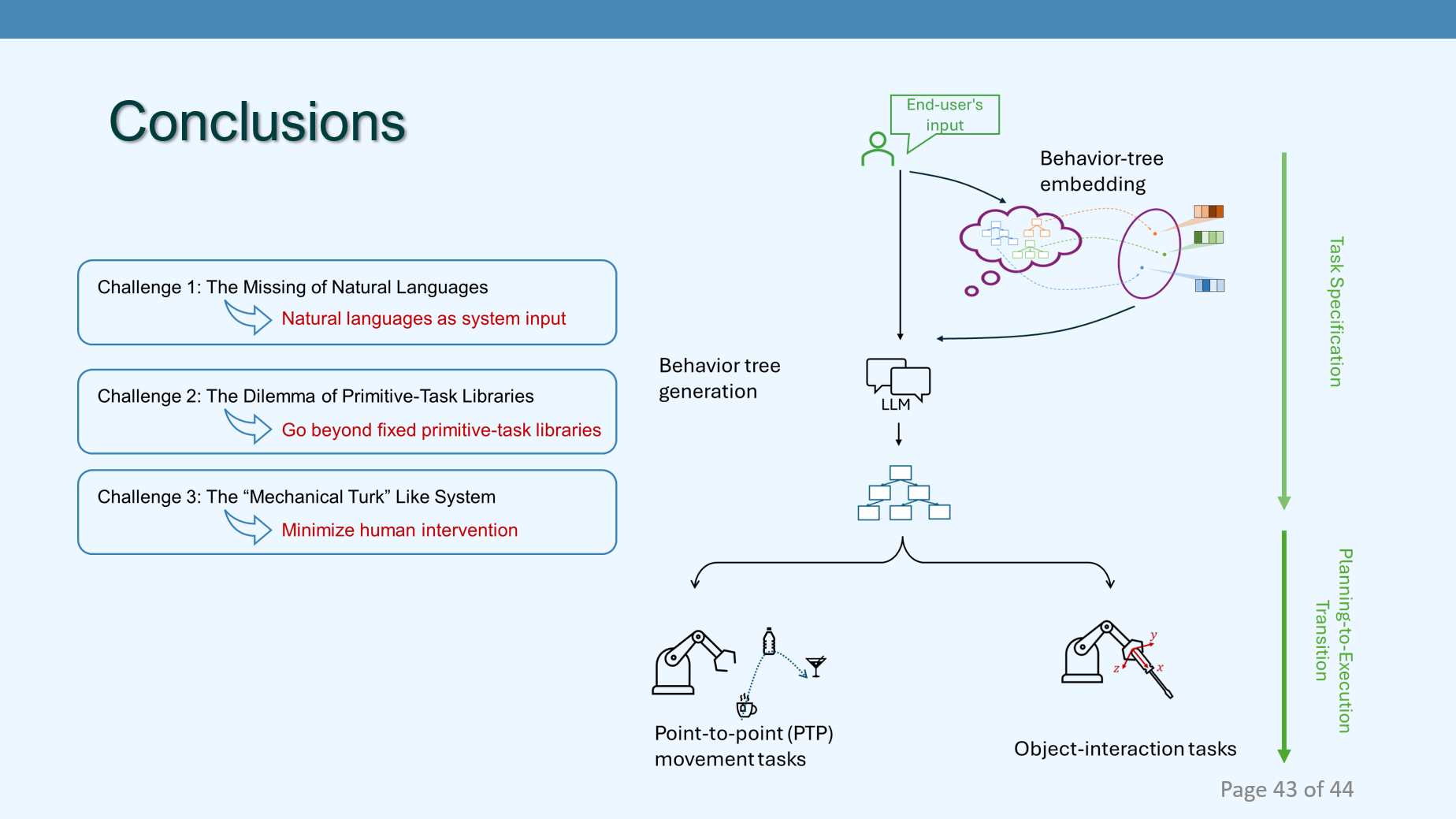
Towards Manipulator Task-Oriented Programming: Automating Behavior-Tree Configuration
Task-Oriented Programming: Program manipulators in terms of high-level tasks, instead of in terms of explicit motions.
Also as Poster at the Northeast Robotics Colloquium, Ithaca NY, 2025.